How to train your first policy. The CartPole-v0 example.
Note
You may find the source code of the CartPole-v0 here.
In this page, you will learn how to setup the python script where the RL policy is going to be trained. It’s worth noting that while any RL framework compatible with OpenAI Gymnasium can be used, the ALPypeRL has primarily been built around ray rllib (or only tested on that environment). rllib is an open-source library for reinforcement learning that is constantly evolving and has a large community of users. If you believe ALPypeRL should support other RL packages, please submit a request.
In summary, in any RL experiment that you build using ALPypeRL, you should be:
Creating an Action and Observation space custom to your simulation.
Wrapping your simulation environment within the BaseAnyLogicEnv.
Warning
Remember to call
super(CartPoleEnv, self).__init__(env_config)at the end of yourCustomEnvif you inheritBaseAnyLogicEnv.On the other hand, there’s a FASTER and MORE SECURE way to create a custom environment by calling
create_custom_env(action_space, observation_space).Configuring your policy and starting your trainning.
Tracking your training progress.
Further details on the actual AnyLogic implementation of the CartPole-v0 can be found down below:
The CartPole-v0 implementation in AnyLogic.
Create the Action and Observation spaces
This step requires the most customization in your Python script since it is specific to the problem you are trying to solve. Most other steps should be applicable to any experiment.
Action space
The action space defines the range of options available to the RL agent when deciding what action to take. These options are inherited from OpenAI Gymnasium. For more details, please refer to their documentation. At this time, ALPypeRL can only support the following types, which should be sufficient in most cases:
Discrete. It supports a range of discrete or integer values. These values can be then translated into specific actions in the simulation model. In the CartPole-v0 example, the model can process 2 actions under the indices of
0and1.0represents a single force that is being applied from left to right and1the opposite, from right to left. Both with equal intensity. In CartPole-v1 you will be able to learn how to apply a continuous force (any value within a range). For further details, visit spaces.Discrete.Box. It allows you create a range of values which can be
1orn-dimensional. In this case, the index of the array represent a value of a controller in the simulation. For example, in CartPole-v1 it refers to the intensity of the force. Such force can take any value in between-1and1. The sign of the value defines the direction of the force. In the CartPole-v2 example, we have separated the action space into a2-dimensionarray where the first index of the array represents the intensity of the force applied on the left (ranging from-1to0) and the second index of the array stands as the intensity of the force applied on the right (any value between0and1). From a technical point of view, it is not the right approach (recommended to just use a single range). But it does prove the ALPypeRL capability. For further details, visit spaces.Box.
Observation space
The observation space is the information that the RL policy will receive (what it can see) from the simulation. You could think that the more your policy can see (or the more parameters you pass), the more chances the policy has to learn. However, irrelevant observations can cause your policy to overfit. In the same way, lack of information can result in slow learning or no learning at all.
Note
Setting up the right action and observation spaces in order for your policy to learn as fast and as better as possible is part of the reinforcement learning challenge and it will vary depending on each problem.
Important
By default, ALPypeRL assumes that the observation space is going to be an array that can go from 1 to n-dimension and wrapped using the Box space.
Wrap your CustomEnv around the BaseAnyLogicEnv
There are two ways to perform this step:
By inheriting
BasicAnyLogicEnv.By calling
create_custom_env.
Inherit BasicAnyLogicEnv
In order for the rllib configuration to accept your environment, you must wrap it around the BaseAnyLogicEnv (in python terms, it requires you to inherit this class). This environment contains all the required functions that rllib is expecting. At the same time, it will handle the connections directly with your AnyLogic model.
Going back to the CartPole-v0 example, your python script for training shoul look like:
import math
from gymnasium import spaces
import numpy as np
from alpyperl import BaseAnyLogicEnv
class CartPoleEnv(BaseAnyLogicEnv):
def __init__(self, env_config=None):
# Positional thresholds
theta_threshold_radians = 12 * 2 * math.pi / 360.0
x_threshold = 2.4
# Create observation space array thresholds
high = np.array(
[
x_threshold * 2, # Horizontal position
np.finfo(np.float32).max, # Linear speed
theta_threshold_radians * 2,# Pole angle
np.finfo(np.float32).max # Angular velocity
]
)
# Create Action and Observation spaces using `gymnasium.spaces`
action_space = spaces.Discrete(2)
observation_space = spaces.Box(-high, high, dtype=np.float32)
# IMPORTANT: Initialise AnyLogic environment experiment after
# environment creation
super(CartPoleEnv, self).__init__(env_config)
As you can see, we have created a simple action space with 2 values as spaces.Discrete(2) which can take either 0 or 1. Later in the simulation, you will be in charge of translating these indices into specifict actions.
On the other hand, we have created an array (size 4) for the observations using the spaces.Box(min, max). The content of the array is expected to be: cartpole position, linear velocity, pole angle against vertical and angular velocity.
When creating a Box space, you will be asked to provide the minimum and maximum values. For this particular problem, the minimum and maximum ranges for the observation space are limited to the cartPole x position and the angle of the pole. The horizontal position represents the limits set in the AnyLogic model (if the car goes beyond the screen) and a certain angle that is considered non-recoverable.
Warning
Another very important step is to call super(CartPoleEnv, self).__init__(env_config) at the end of your configuration. This step will execute the initialization code defined in the parent class BaseAnyLogicEnv.
Call create_custom_env
As mentioned earlier in the summary, there’s a faster way to create a custom environment that will ensure that some of the required steps that you must follow if you inherit BaseAnyLogicEnv are not missed. And this is by using the function create_custom_env(action_space, observation_space). For this particular case, you just need to pass a valid action and observation spaces. The function will return a custom class definition which includes your spaces.
Policy configuration and training execution
Once your environment has been properly wrapped around the BaseAnyLogicEnv you are good to continue setting up the policy that you decide to choose to train (e.g. PPO) and start the training process.
There are plenty of policies available under the rllib package. All of them have their own characteristics and configurable parameters which you’ll learn to use. Other settings are common accross algorithms.
In this example we will be using the PPO or Proximal Policy Optimization algorithm. You can find more details here.
An example of training script:
from alpyperl.examples.cartpole_v0 import CartPoleEnv
from ray.rllib.algorithms.ppo import PPOConfig
# Initialise policy configuration (e.g. PPOConfig), rollouts and environment
policy = (
PPOConfig()
.rollouts(
num_rollout_workers=1,
num_envs_per_worker=1,
)
.environment(
CartPoleEnv, # Or call `create_custom_env(action_space, observation_space)`
env_config={
'run_exported_model': True,
'exported_model_loc': './resources/exported_models/cartpole_v0',
'show_terminals': False,
'verbose': False
}
)
.build()
)
# Create training loop
for _ in range(10):
result = policy.train()
# Save policy at known location
checkpoint_dir = policy.save("./resources/trained_policies/cartpole_v0")
print(f"Checkpoint saved in directory '{checkpoint_dir}'")
# Close all enviornments (otherwise AnyLogic model will be hanging)
policy.stop()
There are a few important notes to take here:
If you decide to scale your training to multiple workers and environments, you must be aware that this is only possible if you are in a possession of an AnyLogic license. That will allow you to export the model into standalone executable. Once you do so, you can proceed to increase the
num_rollout_workersandnum_envs_per_workerto more than 1 (check this link for further details and options). You will also need to set some environment variables viaenv_config. Therun_exported_modelcontrols whether you want to run an exported model or directly from AnyLogic. Theexported_model_locspecifies the location of the exported model folder (it will default to./exported_model).If you are unable to export your model or you are currently debugging it and running it directly from AnyLogic, you should default
num_rollout_workersandnum_envs_per_workerto1and setrun_exported_modeltoFalse. Then, when you run your train script, you should be getting a message informing you that your python script is ready and waiting for your simulation model to be launched on the AnyLogic side. If the connection is succesful, you will see your model running (as fast as possible). That indicates that the training has started. Note that you define the number of training steps in the for loop that encapsulates yourpolicy.train().
Note
'show_terminals' is a flag (or boolean) that allows you to activate each simulation model terminal. This specially useful if you want to track individual models while training via log messages. Remember that this is only applicable if you are running an exported version.
Track your training progress using tensorboard
rllib uses tensorboard to display and help you analyse many parameters from your current policy training.
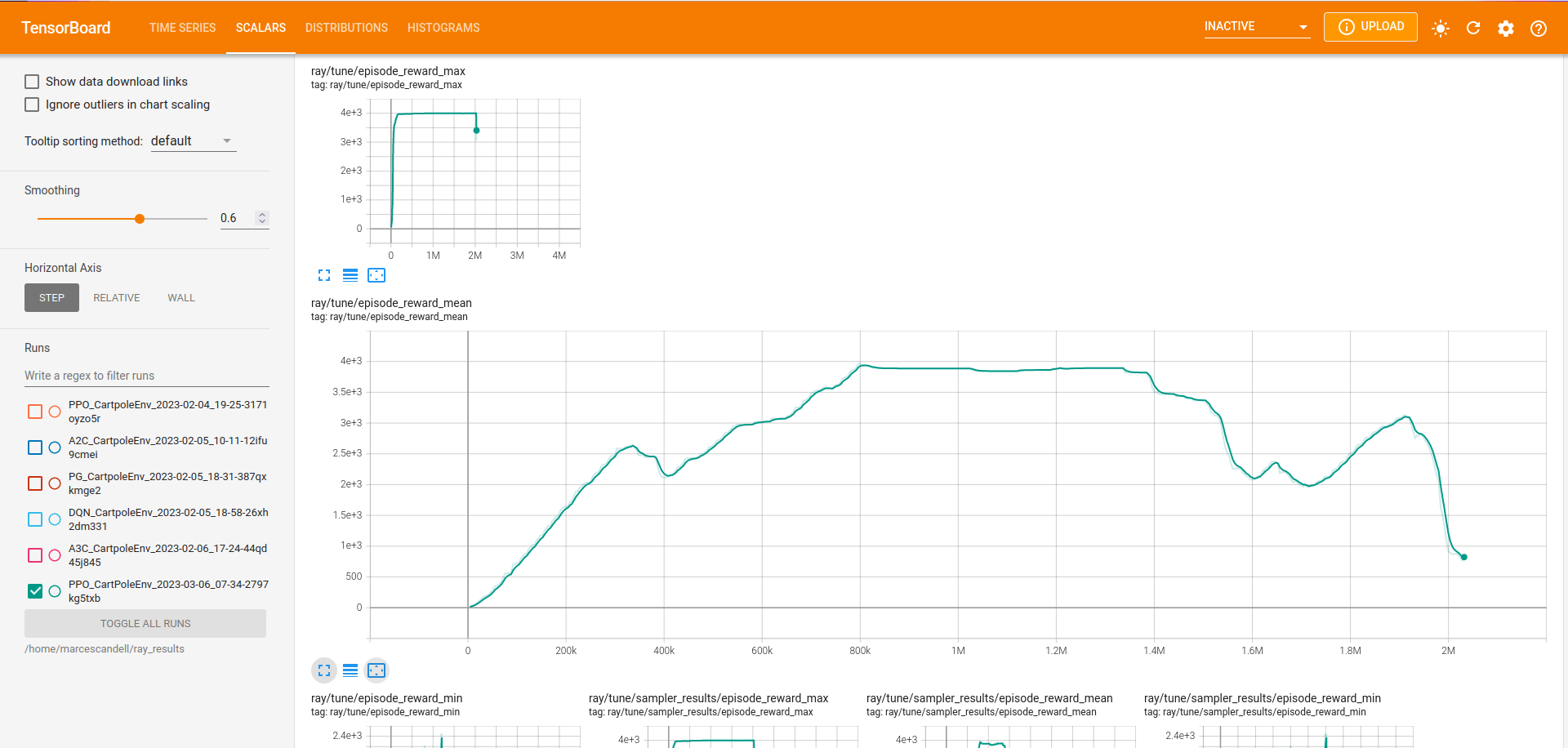
By default, TensorBoard will be saving the training parameters into ~/ray_results. If you want to launch the dashboard and visualise them, you can execute:
tensorboard --logdir=~/ray_results
Tip
Most likely you will be looking to see your policy mean reward as the training progresses. Once your TensorBoard has been launched, you can head to ‘SCALARS’ and apply a filter to display ‘reward’-related parameters (as shown in the screenshot).
The CartPole-v0 implementation
Note
You may find the source code of the CartPole-v0 here.
In this section, you can have a more detailed look on how the CartPole-v0 has been implemented in AnyLogic. Before that, though, you should have connected your AnyLogic model correctly using the ALPypeRLConnector agent. Click here to review how this is done.
Once setup properly, we can continue implementing the required functions by ALPypeRLClientController interface:
Warning
Adding and implementing ALPypeRLClientController is crucial as it will be used by the ALPypeRLConnector to drive the simulation.
void takeAction(ActionSpace action). This function takesALPypeRLConnector.ActionSpaceas an argument.Note
ActionSpaceclass has been build around the assumption that actions can be:A discrete value (or integer) which you can access by calling
int getIntAction()as shown in the CartPole-v0 example.A continuous value, accessible by calling
double getDoubleAction(). Check the CartPole-v1 example.An array of doubles. accessible by calling
double[] getActionArray(). Check the CartPole-v2 example.
Warning
The method that you are calling should be consistent with the action_space that you defined in the custom environment that inherited
BaseAnyLogicEnv(in your python script).For example, calling
getIntActiononly makes sense if you have defined aspaces.Discrete(n). In case there is a missmatch, an exception will be thrown.Following is the code used for CartPole-v0 example in AnyLogic:
// Take action and process switch (action.getIntAction()) { case 0: cartPole.applyForce(-1); break; case 1: cartPole.applyForce(1); break; } // Check if cartpole has reached max steps // or has reached position or angle boundaries boolean exeedPhysLim = cartPole.getXPosition() < -X_THRESHOLD || cartPole.getXPosition() > X_THRESHOLD || cartPole.getAngle() < -THETA_THRESHOLD || cartPole.getAngle() > THETA_THRESHOLD; boolean exeedTimeLim = time() == getEngine().getStopTime(); // Compute rewards and check if the simulation is terminal if (!exeedPhysLim && !exeedTimeLim) { // Set reward reward = 1; } else { // Set reward reward = exeedPhysLim ? 0: 1; // Finish simulation done = true; }
double[] getObservation(). In CartPole-v0 example, 4 parameters will be collected and returned in array form:X position.
Linear velocity.
Pole Angle.
Angular velocity.
The body of the function is pretty straight forward:
return new double[] { cartPole.getXPosition(), cartPole.getLinearVelocity(), cartPole.getAngle(), cartPole.getAngularVelocity() };
double getReward(). As you saw in the code above, a reward of 1 is collected for every step of the simulation where the cart and the pole are within the set boundaries. That is why the reward is a local variable that is set when ontakeActionfunction.boolean hasFinished(). Just likegetReward, there is a local variabledonethat will indicate if the model has exceeded the set boundaries or it has reach the end of the simulation clock. It is set intakeAction.Important
You must return
truewhen the simulation has reached the end. Failing to do so will result in your simulation training geting stuck as exposed here.You can reuse the following code:
// [...] boolean exeedTimeLim = time() == getEngine().getStopTime(); return exeedTimeLim /*[&& other conditions]*/;